ロシアのドローンは2500キロ飛行:実験中に何が判明したのか?
ロシアのNPO法人スターラインの実験用無人車両が10日間で2500kmの距離を走行した。 彼はサンクトペテルブルクからカザンまでの移動のほとんどを自動運転モードで過ごしたが、困難なセクションのみテストドライバーが制御を行った。

プロトタイプはSkoda Superbに基づいて作られ、XNUMXつの制御モードを備えた第XNUMXレベルの自律性システムが装備されています。 最初のモードでは、車を車線内に維持し、標識や交通状況を認識して車線を決定し、ルートを計算します。 XNUMX 番目のモードはまだ最終決定の段階ですが、予見可能な将来、悪天候、マーキングの欠如、および大量の干渉(都市交通など)の存在下でもドローンが移動できるようになります。
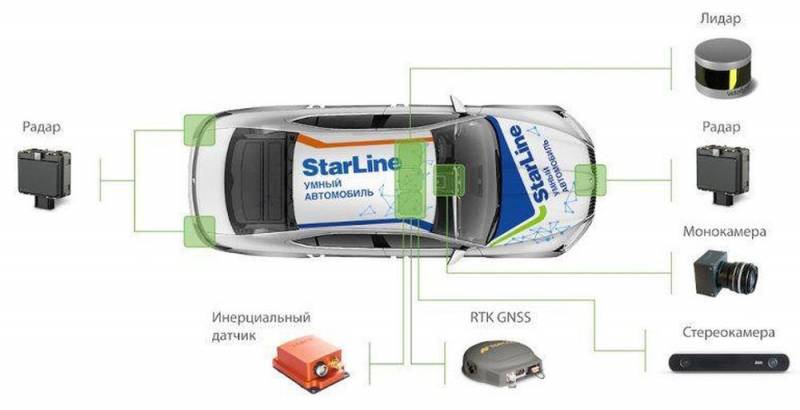
開発者は現在、ウェイポイントを含む高精度の地図を作成中です。 位置は、衛星受信機、慣性航法、オドメトリ (アクチュエータの動きに関するデータを使用して動きを推定すること) を使用して特定できます。 そのため、ドローンの動きを助けるために、ビジョン システムからライダーに至るまで、さまざまなセンサーのセットが必要になります。 ちなみに、私たちが扱っている「Sphere」システム 報告された 早い段階でも役に立ちます。
ちなみに、実験の過程で欠点も判明しました。 したがって、テストドライバーは非常に役に立ちました。 実際、一部の地域ではドローンが車道を認識できませんでした。 彼のコンピュータ システムは大量の情報を処理できず、遅延が発生しました。 彼女は速度を落とした。 しかし、開発者はすでに欠点を解消するために積極的に取り組んでいます。

プロトタイプはSkoda Superbに基づいて作られ、XNUMXつの制御モードを備えた第XNUMXレベルの自律性システムが装備されています。 最初のモードでは、車を車線内に維持し、標識や交通状況を認識して車線を決定し、ルートを計算します。 XNUMX 番目のモードはまだ最終決定の段階ですが、予見可能な将来、悪天候、マーキングの欠如、および大量の干渉(都市交通など)の存在下でもドローンが移動できるようになります。
開発者は現在、ウェイポイントを含む高精度の地図を作成中です。 位置は、衛星受信機、慣性航法、オドメトリ (アクチュエータの動きに関するデータを使用して動きを推定すること) を使用して特定できます。 そのため、ドローンの動きを助けるために、ビジョン システムからライダーに至るまで、さまざまなセンサーのセットが必要になります。 ちなみに、私たちが扱っている「Sphere」システム 報告された 早い段階でも役に立ちます。

ちなみに、実験の過程で欠点も判明しました。 したがって、テストドライバーは非常に役に立ちました。 実際、一部の地域ではドローンが車道を認識できませんでした。 彼のコンピュータ システムは大量の情報を処理できず、遅延が発生しました。 彼女は速度を落とした。 しかし、開発者はすでに欠点を解消するために積極的に取り組んでいます。
情報